kiteml.com
Try now
Used by researchers from







The tools exist.
The workflow doesn't.
The status quo
Training fails silently
Crashes at 95%. No warning.
Debugging is blind
Five tools. No unified view.
GPU setup kills speed
Configure before you iterate.
Sim-to-real gaps
Works in sim. Fails on hardware.
There's a better way.
Built on what you know.
ROSMiddleware
MuJoCoPhysics
NVIDIA IsaacSimulation
Cloud GPUsCompute
Your stackCustom
Use our defaults or bring your own frameworks, robots, and hardware.
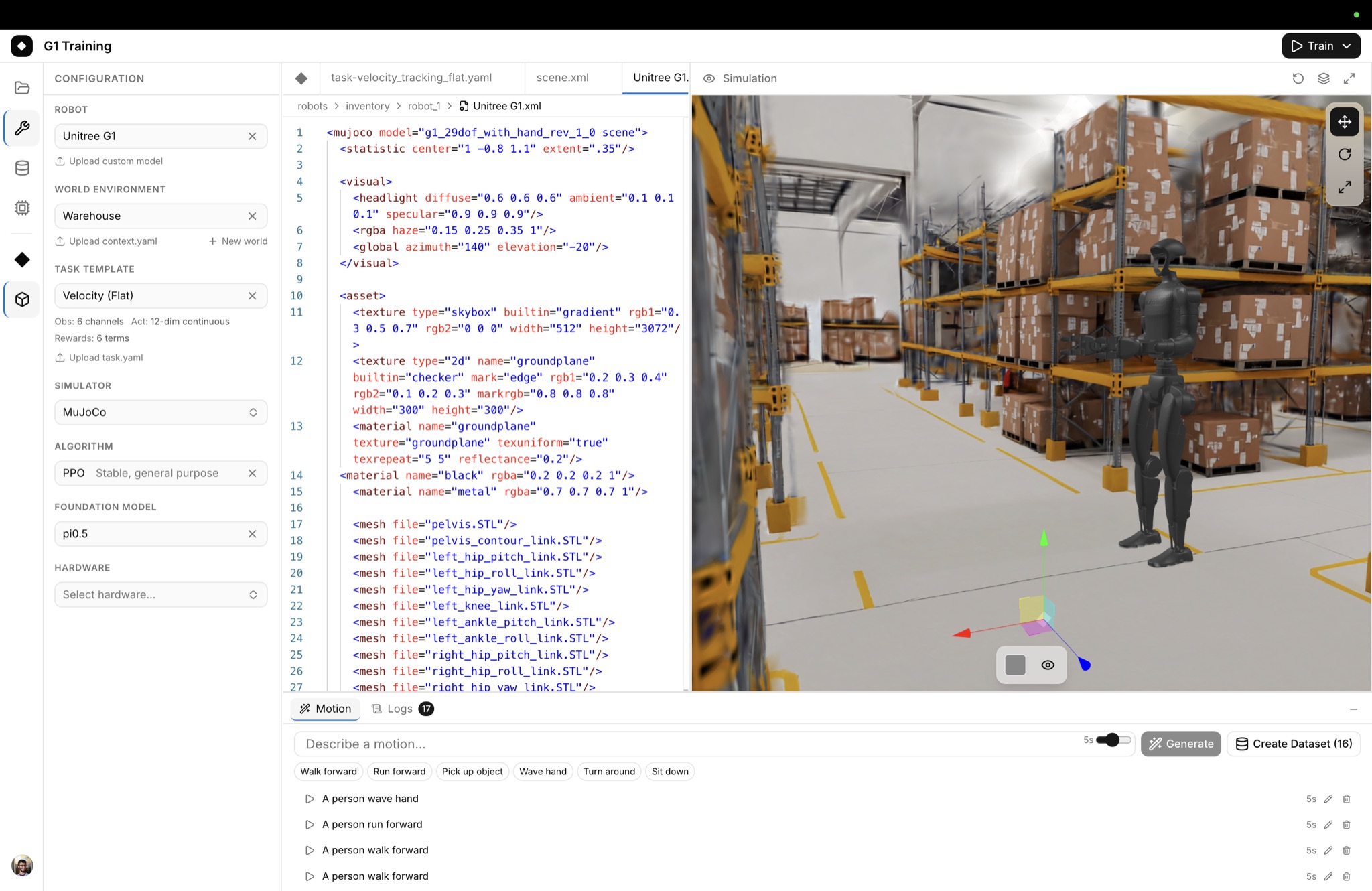
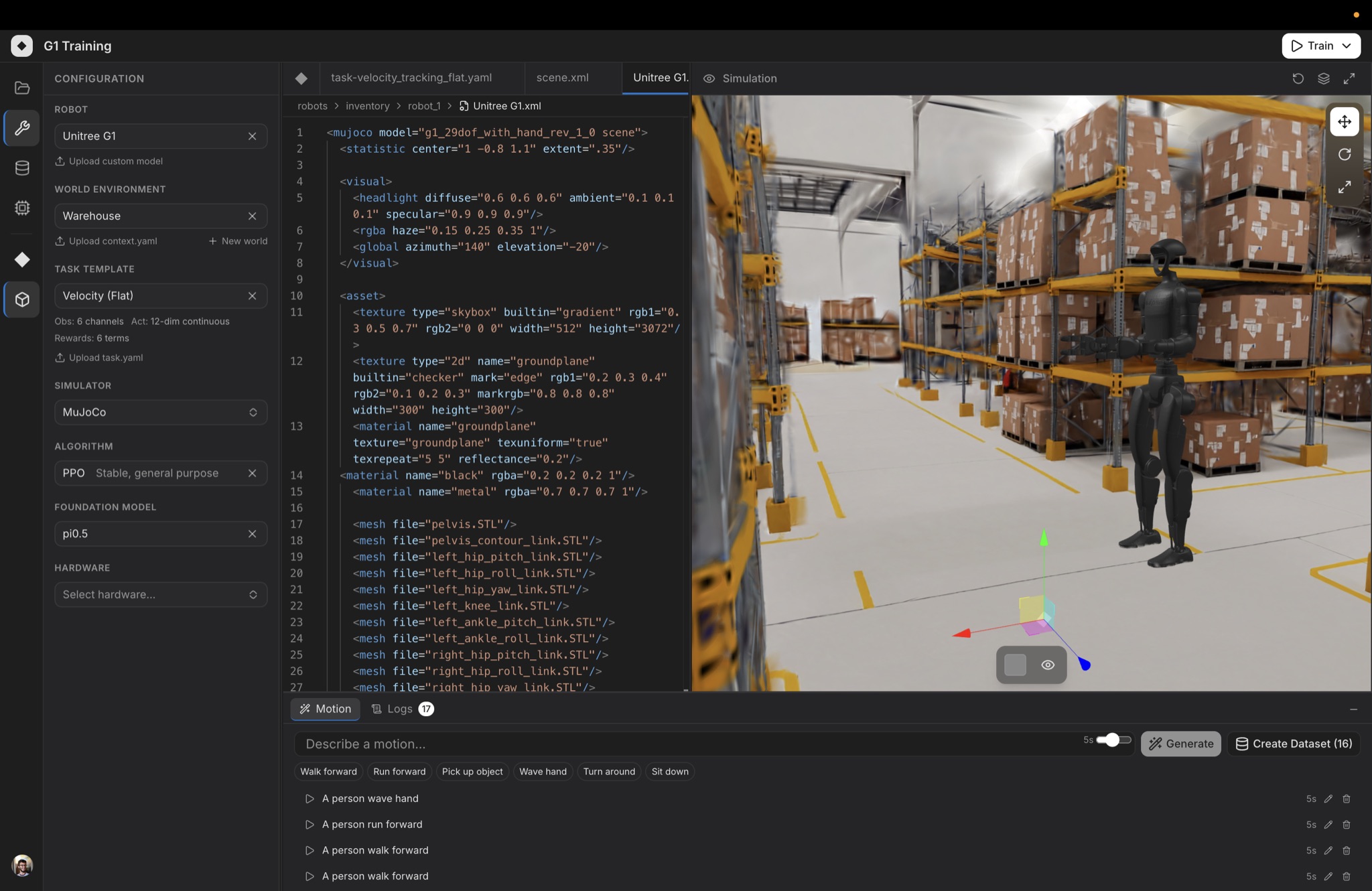
Your workflow, unified.
From robot to deployment in one workspace.
Load any robot
Unitree G1
Franka Emika
Custom URDF
Define task and context
> Pick and place objects from belt
indoorconveyor6-DOF
Validate before training
Robot compatible
Task valid
Env configured
Ready
Train and deploy
1.3M / 2M67%
One pipeline
Load
Define
Validate
Train
Deploy